De Buitenboordmotor van de RC Zodiac Medline 500
De buitenboordmotor vormt een essentieel onderdeel van mijn op afstand bestuurbare Zodiac Medline 500-project. Het vinden van een geschikte schaal 1:10 motor bleek echter een uitdaging. Standaardmodellen zijn vaak ontworpen voor raceboten met een vlakke bodem, terwijl mijn Zodiac een diepere romp heeft. Hierdoor zou een standaardmotor niet correct onder de boot uitsteken. Een langstaart buitenboordmotor was nodig, maar die zijn zeldzaam in deze schaal. Dit leidde tot de beslissing om zelf een aangepaste motor te ontwerpen.
De Zoektocht naar een Geschikt Model
Na uitgebreid zoeken vond ik bij Spyker Workshop een 3D-geprinte buitenboordmotor die visueel en qua schaal goed aansloot. Helaas was deze te kort voor mijn toepassing en werden de 3D-bestanden niet los verkocht, wat aanpassingen bemoeilijkte.Gelukkig stuitte ik op de website van Ethan Hoefler die een technisch goed doordacht ontwerp gratis deelt. Dit model bood een uitstekende basis voor verdere aanpassingen.
Het basis ontwerp gevonden 😀
Aanpassingen aan het Ontwerp
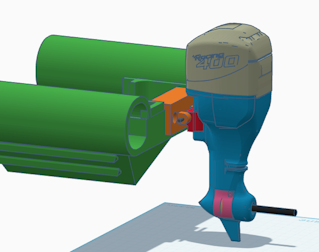
Om het model geschikt te maken voor mijn boot, heb ik de 3D-bestanden in TinkerCad geïmporteerd en de staart verlengd, waardoor de motor een slanker uiterlijk kreeg dat doet denken aan een 80 pk motor. Daarnaast heb ik de motorkap verlaagd om het schaalbeeld te verbeteren.
 Een extra functie die ik wilde toevoegen, is de mogelijkheid om de motor tijdens het varen te trimmen. Door een scharnierpunt toe te voegen en een servo te positioneren, kan de motor voor- en achterover kantelen. Dit beïnvloedt de vaareigenschappen,
zoals het bereiken van plané of het aanpassen aan golfslag.
Een extra functie die ik wilde toevoegen, is de mogelijkheid om de motor tijdens het varen te trimmen. Door een scharnierpunt toe te voegen en een servo te positioneren, kan de motor voor- en achterover kantelen. Dit beïnvloedt de vaareigenschappen,
zoals het bereiken van plané of het aanpassen aan golfslag.
- De ovaal geworden gaten door het oprekken van het model moeten worden gecorrigeerd.
- De bedrading door de motorkap vereist een nettere oplossing.
- Een effectief koelsysteem moet worden geïntegreerd.
Zodra deze aspecten zijn aangepakt en de onderdelen binnen zijn, zal ik beginnen met het printen en assembleren van de motor. Updates over de voortgang en testresultaten zal ik op deze pagina delen.